


电路原理图见图2所示,该操控器由稳压电源电路、PWM发生电路、电机驱动电路、蓄电池放电指示电路、电机过流及蓄电池过放电

稳压电源由V3(TL431),Q3等元件组成,从36V蓄电池经过串联稳压后得到12V电压,给操控电路供电,调理VR6可校准12V电源。
PWM电路以脉宽调制器TL494为中心组成。R3、C4与内部电路发生振动,频率大约为12kHz。
H是高变低型霍尔速度操控转把,由松开到旋紧时,其输出端可得到4V—1V的电压。该电压加到TL494的②脚,与①脚电压作比较,在⑧脚得到调宽脉冲。②脚电压越低,⑧脚输出的调宽脉冲的低电平部分越宽,电机转速越高,电位器VR2用于零速调理,调理VR2使转把松开时电机停转再过一点。
电机驱动电路由Q1、Q2、Q4等元件组成。电机MOTOR为永磁直流有刷电机。TL494的⑧脚输出的调宽脉冲,经Q1反相扩大驱动VDMOS管Q2。TL494的⑧脚输出的调宽脉冲低电平部分越宽,则Q2导通时刻越长,电机转速越高。D1是电机续流二极管,避免Q2击穿。TL494的⑧脚输出低电平时,Q1、D2导通,Q4截止,Q2导通;TL494的⑧脚输出高电平时,Q1、D2截止,Q4导通,敏捷将Q2栅极电荷泄放,加快Q2的截止进程,对下降Q2温度有十分重要的效果。
蓄电池放电指示电路由LM324组成四个比较器,12V由R24、VR1、VR4、VR3、VR5、R21分压构成四个不同基准电压别离加到四个比较器的反相端。蓄电池电压经R23和R22分压加到每个比较器的同相端,该电压和蓄电池电压成份额。VA=VB*R22/(R22R23)。当蓄电池电压不低于38V时,LED1、LED2、LED3均点亮;当电池电压低于38V时,LED3平息;当电池电压低于35V时,LED2平息;当电池电压低于33V时,LED1平息,此刻应给电池充电。调理VR1、VR4、VR3可别离设定LED3、LED2、LED1平息时的电压。LED4用作电源指示,LED5用作欠压堵截操控器输出指示。
蓄电池过放电维护当蓄电池放电到31.5V时.LM324的①脚输出低电平,三极管Q5导通,约5V电压加到TL494的死区操控端④脚。该脚电位≥3.5V,就会迫使TL494内部调宽脉冲输出管截止,然后使三极管Q1、Q2截止,电机中止作业,蓄电池放电中止,进入电池维护情况。此刻LED5点亮,指示出该情况。VR5用于设定电池维护点电压。
电机过流维护R30为电机电流取样电阻,当过流时,取样电压经R14加到TL494的⑩脚。当⑩脚电位高于⑩脚电位时,TL494内部运放2输出高电平,迫使TL494内部调宽脉冲输出管截止,然后使Q1、Q2截止,电机中止作业,然后维护了电机。
制动维护当刹车制动时,KEY2接通.5V电压加到TL494的死区操控端④脚,迫使TL494内部调宽脉冲输出管截止,然后使Q1、Q2截止,电机中止作业,施行制动维护。
调速电路零速调试:速度转把彻底松开。调理VR2使电机停转并再调过一点以确保牢靠置零速。制动调试:滚动速度转把,电机旋转。此刻闭合制动开关KEY2,Q2栅极应立即变为低电平0V。过流维护调试:滚动速度转把,Q2栅极为高电平12V。此刻在源极对地之间加上0.8V左右的电压,栅极应很快变为低电平。
蓄电池放电指示电路用可调电源替代蓄电池。电压为38V时,调理VR1,使LED3刚好平息;电压为35V时,调理VR2,使LED2刚好平息;电压为33V时,调理VR3,使LED1刚好平息;电压为31V时,调理VR5,使LED5刚好点亮,此刻TL494的④脚应为高电平5V左右,进入电池欠压维护情况。经过上述设置,仅LED1点亮时,电压为33V-34V,应及时给蓄电池充电,不过LED1平息至LED5点亮最近一段时刻,蓄电池还可保持运转,但LED5点亮时,进入欠压维护情况。此刻应留意,过一瞬间电池电压因电机停转而上升,维护免除,又恢复作业。如此重复维护-作业-维护的成果会损坏电池和操控器,故应避免这种情况。
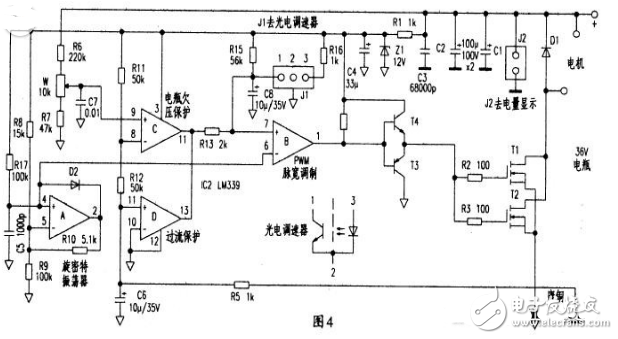
运用LM324、LM393和LM339制造的有刷操控器牢靠性是很高的,便是器材数量多些。该操控器仅用一片LM339制造有刷操控器部分。用另一块LM339制成电量显现部分。显现部分见图3,电路原理见图4所示。
光电速度转把改为霍尔速度转把要害有两点:一是加装5V稳压电源;二是依据原速度信号输出点信号改变规则,选用相应信号改变的霍尔调速转把。
该有刷操控器以PWM电路为中心,前面有三角波发生器、电瓶欠压检测、电机过电流检测;后边有驱动、功率开关等。每部分都是独立的。查看调试都较为便利。三角波发生器由IC2A、R17、C5、D2、R9、R10等组成施密特振动器,在C5上发生三角波。脉宽调制器是IC2B,它的输入之一⑥脚,为来自C5上的三角波,输入之二⑦脚,是来自速度转把(J1)①脚的速度信号。从IC2B①脚输出调宽脉冲,送互补推挽扩大器。互补推挽驱动由T3、T4组成,脉冲高电平到来,上管NPN管T4导通,12V加到功率管T1、T2的栅极,T1、T2导通;脉冲低电平到来,上管NPN管T4截止。下管PNP管T2导通,将T1、T2栅极的电荷敏捷放掉,T1、T2截止。电池欠压维护由IC2C组成电压比较器,当电瓶电压低于31.5V时,它的⒁脚变为低电位,相当于R13输入一端接地,将转把速度信号降到挨近零伏。使IC2B①脚呈低电平,T4截止、T3导通;T1、T2截止。过电流维护由IC2D组成电压比较器,当过电流时。R4右端电位变低。经过R5加到IC2D⑾脚,比较器翻转⒀脚变为低电位,相同相当于R13输入一端接地。将转把速度信号降到挨近零伏,使T1、T2截止。
该型电动叉车选用的是操控器厂商引荐的操控电路,如图1所示。当电源开关S2接通后,逆变器逻辑电源KS1得电。逆变器经过白检后,主接触器KM1线圈两头发生压差,主接触器KM1触点闭合,蓄电池经过功率电阻K向逆变器电容C充电,而且检测逆变器电容C是否在规则的时刻内足够了电。如果在规则时刻完结向逆变器电容C充电,叉车操控办理体系功率单元接通蓄电池电源,可操纵电动叉车正常作业。为满意电动叉车灯火、声光警示及各种功用传感器的需求,一起确保蓄电池组均衡充放电,操控办理体系多选用大功率DC-DC直流电源转换器为用电器供给12V或24V电源。

